

 QQ
QQ
发那科机器人Roboguide概述
声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
Roboguide软件可以加载不同的功能模块,这些模块可以按照应用来区分,比如搬运、涂胶、弧焊和点焊等应用,在安装软件时可以只选择其中某一应用模块进行安装。在搬运应用中还可以进行机床上下料、冲压、金属及非金属加工等应用的模拟仿真。
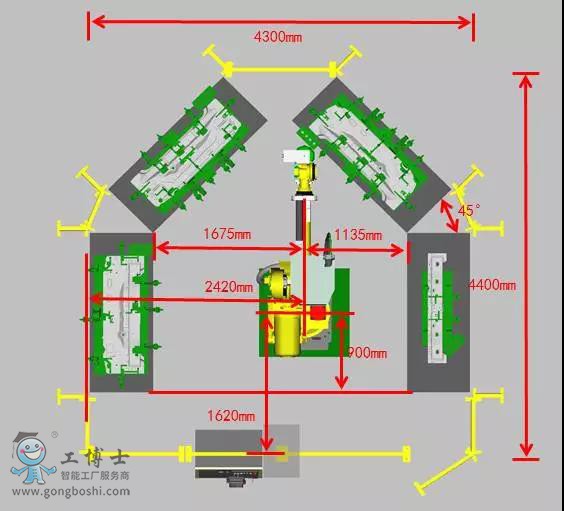
总体来说,无论是哪种应用,都可以利用Roboguide软件仿真来确认工作站或者焊房与机器人之间的布局、分析机器人的可达性干涉性和估算系统的生产节拍等。只是每种应用所针对的具体内容是不一样的。
例如,确认机器人与工作站之间的布局,对于搬运应用来说,主要是机器人与机床、传送带、料架、相机、换爪台和围栏光栅等的距离;涂胶应用主要是确认机器 人与夹具、转台、油杯、刮胶器和围栏的距离;弧焊应用则是确认机器人与夹具、转台、焊丝桶、送丝机、清枪器和焊房光栅的距离;点焊应用是确认机器人与夹 具、修磨机、转台、滑台、换枪盘和围栏光栅的距离。
计算系统节拍时除了优化机器人的轨迹之外,搬运机器人需要计算手爪动作的时间和等待手爪抓牢的时间;点焊机器人主要是计算转台翻转的节拍、滑台滑动的时 间和点焊的持续时间;涂胶机器人计算刮胶的时间和转台翻转时间;弧焊机器人计算起收弧时间、焊接时间、清枪时间和转台变位机转动时间。
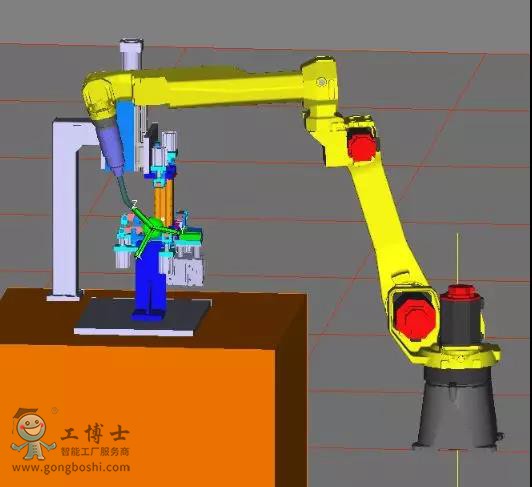
在进行Roboguide仿真时,机器人的工作姿态必须与实际保持一致,TCP设置得尽量精准,机器人在运动中避免出现各轴的限位和奇异点,、机器人的轨迹做到优化,这样才能相对准确地得出仿真的结果。
更多资讯:发那科机器人配件
