

 QQ
QQ
·ўДЗҝЖ»ъЖчИЛ№ӨҫЯЧшұкПөөДЙиЦГУлК№УГЈЁБщөгКҫҪМ·ЁЈ©
ЙщГчЈәұҫГҪМеІҝ·ЦНјЖ¬ЎўОДХВАҙФҙУЪНшВз
ЙщГчЈәұҫГҪМеІҝ·ЦНјЖ¬ЎўОДХВАҙФҙУЪНшВз
°жИЁ№йФӯЧчХЯЛщУРЈ¬ИзУРЗЦИЁЈ¬ЗлУлОТБӘПөЙҫіэЎЈ
БщөгКҫҪМ·Ё°ьАЁБщөгЈЁXYЈ©КҫҪМ·ЁЎўәНБщөгЈЁXZЈ©КҫҪМ·ЁЎЈ
БщөгЈЁXZЈ©КҫҪМ·ЁЦРЈ¬ИЎТ»ёц·ҪПтФӯөгЎўТ»ёцУлЛщРи№ӨҫЯЧшұкПөЖҪРРөДXЦб·ҪПтөгЎўТ»ёцXZЖҪГжЙПөДөгЎЈҙЛКұЈ¬НЁ№эөСҝЁ¶ыөг¶Ҝ»т№ӨҫЯөг¶ҜҪшРРКҫҪМЈ¬ТФК№№ӨҫЯөДЗгРұұЈіЦІ»ұдЎЈ

1.°ҙПВ [MENU] ЈЁІЛөҘЈ©јьЈ¬ПФКҫіц»ӯГжІЛөҘЎЈ
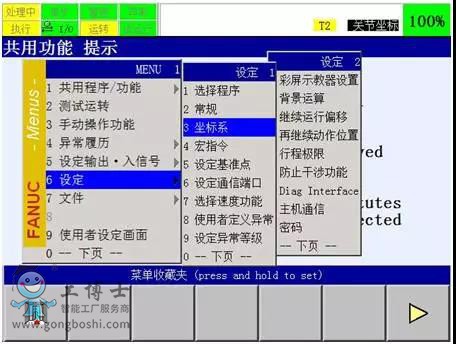
4.°ҙПВF2“ПкПё”ЎЈіцПЦЛщСЎөДЧшұкПөәЕВлөД№ӨҫЯЧшұкПөЙи¶Ё»ӯГжЎЈ
5.°ҙПВF2“·Ҫ·Ё”ЎЈ
6.СЎФс“Бщөг·ЁЈЁXZЈ©”ЎЈ
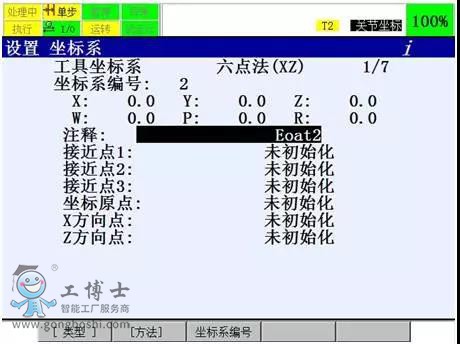
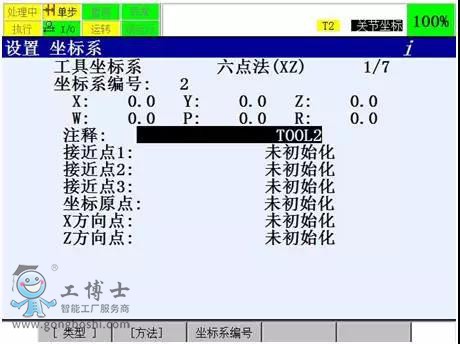
a Ҫ«№вұкТЖ¶ҜөҪЧўКНРРЈ¬°ҙПВENTERЈЁКдИлЈ©јьЎЈ
b СЎФсК№УГөҘҙКЎўУўОДЧЦДёЎЈ
c °ҙПВККөұөД№ҰДЬјьЈ¬КдИлЧўКНЎЈ
d ЧўКНКдИлНкәуЈ¬°ҙПВ ENTER јьЎЈ
8.јЗВјёчІОХХөгЎЈ
ҙЛҙҰТФИзПВЧЛКЖОӘАэЈә
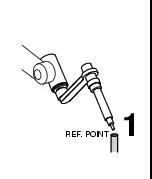
1)јЗВјҪУҪьөг1Јә
a.ТЖ¶Ҝ№вұкөҪҪУҪьөг1ЈЁApproach point 1Ј©Ј»
b.°СКҫҪМЧшұкЗР»»іЙИ«ҫЦЧшұкЈЁWORLDЈ©әуТЖ¶Ҝ»ъЖчИЛЈ¬К№№ӨҫЯ**ҪУҙҘөҪ»щЧјөгЈ»
c.°ҙЎҫSHIFTЎҝ+ F5ЎҫRECORDЎҝЈЁО»ЦГјЗВјЈ©јЗВјЎЈ
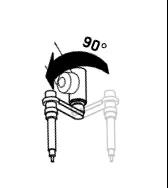
2)јЗВјҪУҪьөг2Јә
a.СШИ«ҫЦЧшұкЈЁWORLDЈ©+Z·ҪПтТЖ¶Ҝ»ъЖчИЛ50mmЧуУТЈ»
b.ТЖ¶Ҝ№вұкөҪҪУҪьөг2ЈЁApproach point 2Ј©Ј»
c.°СКҫҪМЧшұкЗР»»іЙ№ШҪЪЧшұкЈЁJOINTЈ©Ј¬РэЧӘJ6ЦбЈЁ·ЁАјГжЈ©ЦБЙЩ90¶ИЈ¬І»ТӘі¬№э180¶ИЈ»
d.°СКҫҪМЧшұкЗР»»іЙИ«ҫЦЧшұкЈЁWORLDЈ©әуТЖ¶Ҝ»ъЖчИЛЈ¬К№№ӨҫЯ**ҪУҙҘөҪЧјөгЈ»
e.°ҙЎҫSHIFTЎҝ+ F5ЎҫRECORDЎҝЈЁО»ЦГјЗВјЈ©јЗВјЈ»
f.СШИ«ҫЦЧшұкЈЁWORLDЈ©өД+Z·ҪПтТЖ¶Ҝ»ъЖчИЛ50mmЧуУТЈ»
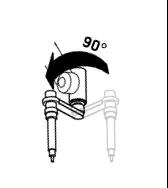 3)јЗВјҪУҪьөг3Јә
3)јЗВјҪУҪьөг3Јә a.ТЖ¶Ҝ№вұкөҪҪУҪьөг3ЈЁApproach point 3Ј©Ј»
b.°СКҫҪМЧшұкЗР»»іЙ№ШҪЪЧшұкЈЁJOINTЈ©Ј¬РэЧӘJ4ЦбәНJ5ЦбЈ¬І»ТӘі¬№э90¶ИЈ»
c.°СКҫҪМЧшұкЗР»»іЙИ«ҫЦЧшұкЈЁWORLDЈ©Ј¬ТЖ¶Ҝ»ъЖчИЛЈ¬К№№ӨҫЯ**ҪУҙҘөҪ»щЧјөгЈ»
d.°ҙЎҫSHIFTЎҝ+F5ЎҫRECORDЎҝЈЁО»ЦГјЗВјЈ©јЗВјЈ»
e.СШИ«ҫЦЧшұкЈЁWORLDЈ©өД+Z·ҪПтТЖ¶Ҝ»ъЖчИЛ50mmЧуУТЈ»

a.Ҫ«»ъЖчИЛЧЛМ¬КҫҪМЦБ№ӨҫЯөДБҪёцМШХч·ҪПтУлИ«ҫЦЧшұкЈЁWORLDЈ©өДБҪёц·ҪПтЖҪРРЎЈ
b.ТЖ¶Ҝ№вұкөҪ·ҪПтФӯөгЈЁOrient Origin PointЈ©Ј»
c.°ҙЎҫSHIFTЎҝ+F5ЎҫRECORDЎҝЈЁО»ЦГјЗВјЈ©јЗВјЈ»
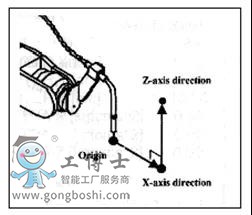
a.ТЖ¶Ҝ№вұкөҪX·ҪПтөгЈЁX Direction PointЈ©Ј»
b.°СКҫҪМЧшұкЗР»»іЙИ«ҫЦЧшұкЈЁWORLDЈ©Ј»
c.ТЖ¶Ҝ»ъЖчИЛЈ¬К№№ӨҫЯСШЛщРиТӘЙи¶ЁөД+X·ҪПтЦБЙЩТЖ¶Ҝ250mmЈ»
d.°ҙЎҫSHIFTЎҝ+F5ЎҫRECORDЎҝЈЁО»ЦГјЗВјЈ©јЗВјЈ»
6)¶ЁТе+Z·ҪПтөгЈә
a.ТЖ¶Ҝ№вұкөҪ·ҪПтФӯөгЈЁOrient Origin PointЈ©Ј»
b.°ҙЎҫSHIFTЎҝ+F4ЎҫMOVE_TOЎҝЈЁО»ЦГТЖ¶ҜЈ©К№»ъЖчИЛ»ЦёҙөҪOrient Origin PointЈЁ·ҪПтФӯөгЈ©Ј»
c.ТЖ¶Ҝ№вұкөҪZ·ҪПтөгЈЁZ Direction PointЈ©Ј»
d.ТЖ¶Ҝ»ъЖчИЛЈ¬К№№ӨҫЯСШЛщРиТӘЙи¶ЁөД+Z·ҪПтЈЁТФИ«ҫЦЧшұкЈЁWORLDЈ©·ҪКҪЈ©ЦБЙЩТЖ¶Ҝ 250mmЈ»
e.°ҙЎҫSHIFTЎҝ+F5ЎҫRECORDЎҝЈЁО»ЦГјЗВјЈ©јЗВјЈ»
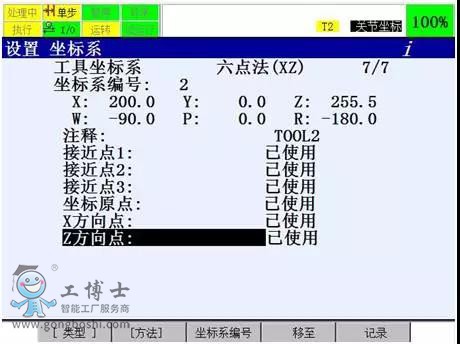
9.¶ФЛщУРІОҝјөг¶јҪшРРКҫҪМәуЈ¬ПФКҫ“ТСК№УГ”ЎЈ№ӨҫЯЧшұкПөјҙұ»Йи¶ЁЎЈ
10.ФЩ°ҙЧЎSHIFTјьөДН¬Кұ°ҙПВF4“ТЖЦБ”Ј¬јҙҝЙК№»ъЖчИЛТЖ¶ҜөҪЛщјЗВјөДөгЎЈ
11.ТӘИ·ИПТСјЗВјөДёчөгөДО»ЦГКэҫЭЈ¬ҝЙТФҪ«№вұкЦёПтёчІОҝјөгЈ¬°ҙПВENTERјьАҙІйҝҙёчөгөДПкПёО»ЦГКэҫЭЎЈТӘ·ө»ШФӯПИөД»ӯГжЈ¬°ҙПВPREVЈЁ·ө»ШЈ©јьЎЈ
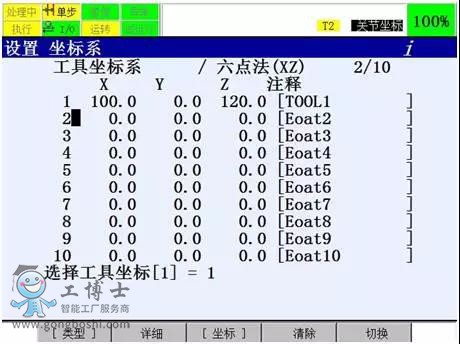
12.°ҙПВPREVЈЁ·ө»ШЈ©јьЈ¬ПФКҫ№ӨҫЯЧшұкПөТ»АА»ӯГжЎЈҝЙТФИ·ИПЛщУР№ӨҫЯЧшұкПөөДЙи¶ЁЦөЎЈ

ЧўТвЈә
ИфІ»°ҙПВ F5 “ЗР»»”Ј¬ЛщЙи¶ЁөДЧшұкПөҫНІ»»бУРР§ЎЈТІҝЙТФК№УГSHIFT + COORDАҙСЎФсРиТӘК№УГөДЧшұкПөәЕВлЎЈ
14.ТӘЗеіэЛщЙи¶ЁөДЧшұкПөКэҫЭЈ¬°ҙПВF4 “Зеіэ”ЎЈ
ёь¶аЧКС¶Јә·ўДЗҝЖ»ъЖчИЛЕдјю
