

 QQ
QQ
发那科机器人之如何察看机器人当前的位置信息
声明:本媒体部分图片、文章来源于网络
声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
如何察看机器人当前的位置信息?机器人的当前位置信息表示的是机器人在空间上的位置和姿态。当前位置信息有两种显示方式:基于关节坐标值的显示和基于直角坐标值的显示。
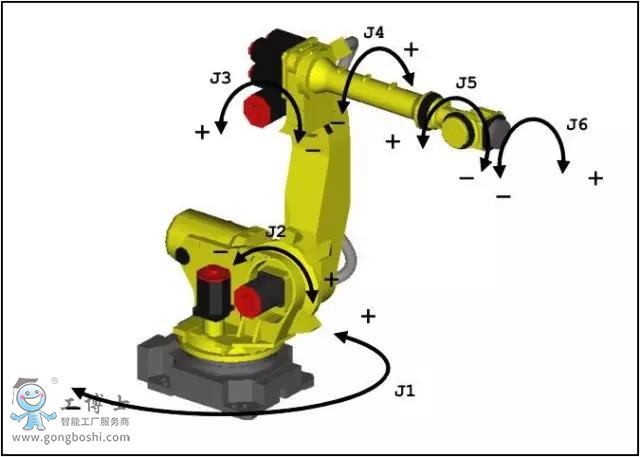
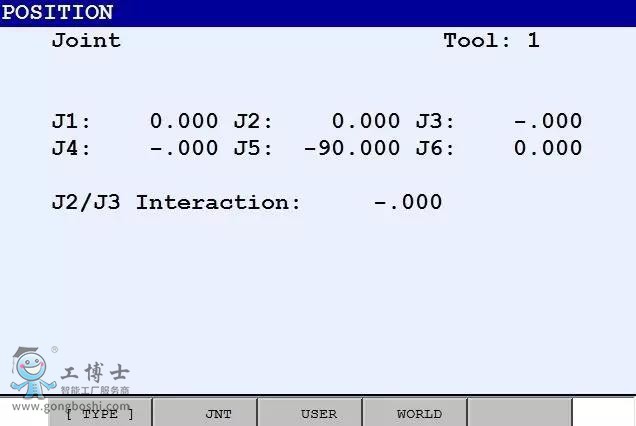
关节坐标值
基于关节坐标值的显示:通过各轴相对于基座侧的轴的旋转角来显示当前位置。
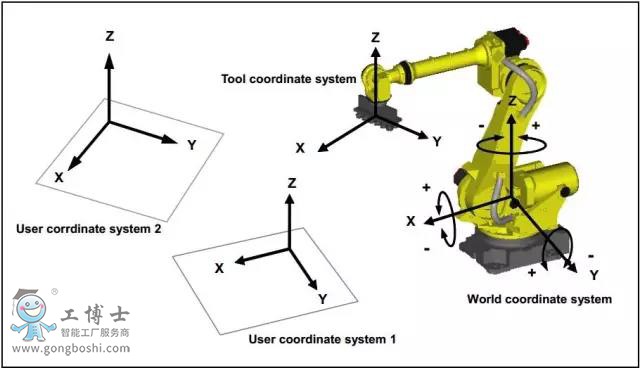
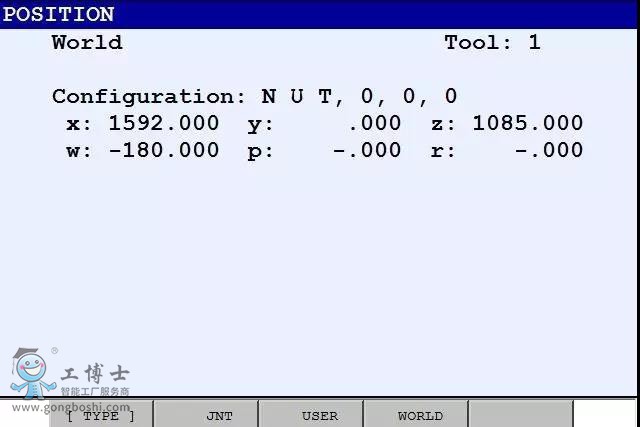
直角坐标值
基于直角坐标值的显示:为了确定工具的位置和姿势,使用机器人手腕中所定义的工具坐标系和设定于空间的直角坐标系来显示当前位置信息。
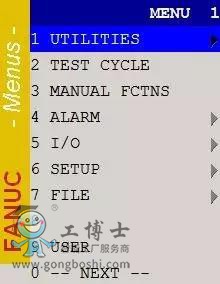
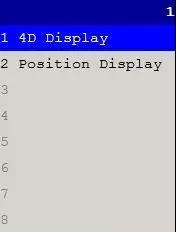
步骤1:按下【MENU】(菜单)键,显示画面菜单。
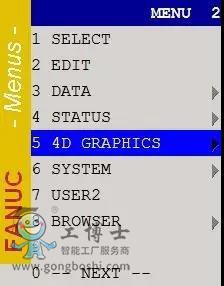
步骤3:按下F1【类型】,选择“ 2 Position Display ”。显示当前位置界面。
① 要显示关节坐标值,按下F2 “JNT(关节坐标)”。

更多资讯:发那科机器人
- 下一篇:发那科工业机器人的五个坐标系你都了解吗?
- 上一篇:发那科智能包装与仓储技术
